
ros机器人程序设计大赛
ROS机器人编程大作业指导
ROS(机器人操作系统)是一个广泛用于机器人开发的机器人软件框架,提供了构建机器人应用程序所需的各种库和工具。编写ROS机器人编程大作业是一个非常有趣和有挑战性的任务,下面是一些建议:
在开始大作业之前,首先确定你感兴趣的主题或问题。这可以是导航算法、目标识别、运动规划等等。确定主题后,你可以更有针对性地深入学习相关知识。
在进行大作业之前,建议你先学习ROS的基础知识,包括ROS的概念、架构、节点、主题、服务、消息等等。这将帮助你更好地理解如何使用ROS构建你的项目。
在开始编程之前,选择一个合适的开发工具非常重要。常用的ROS开发工具包括RViz、RQT、Gazebo等。这些工具可以帮助你可视化机器人的运动、传感器数据等。
根据你选择的主题,着手编写代码。你可以使用C 或Python等语言来编写ROS节点。确保你的代码能够订阅、发布正确的主题,并与其他节点进行通信。
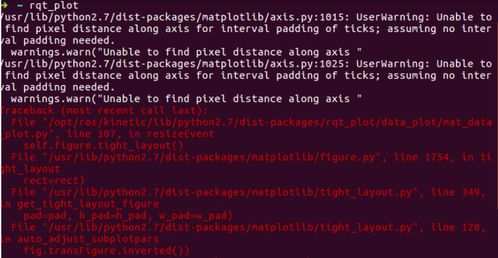
在编写完代码后,进行测试与调试是非常重要的一步。确保你的代码可以正常运行,并且能够实现你预期的功能。如果出现问题,可以利用ROS提供的工具进行调试。
完成编程后,不要忘记撰写文档,记录你的项目背景、目的、实现方法以及遇到的问题与解决方案。另外,你还可以考虑将你的作业展示给其他人,分享你的成果与经验。
ROS机器人编程大作业是一个结合理论与实践的任务,通过动手实践,你将更好地掌握机器人编程的技能。祝你在大作业中取得成功!
免责声明:本网站部分内容由用户自行上传,若侵犯了您的权益,请联系我们处理,谢谢!联系QQ:2760375052 沪ICP备2023024866号-10










评论