
fanuc机器人在线编程实操基础
Fanuc机器人编程指南
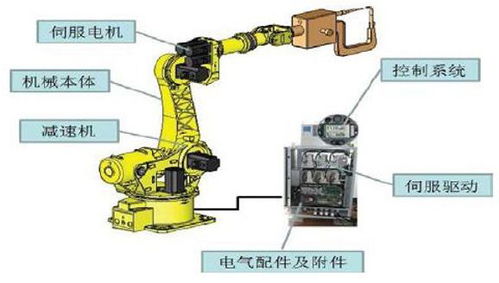
在制造业中,Fanuc机器人广泛应用于自动化生产线,其高效性和可靠性备受认可。了解如何编程Fanuc机器人是掌握自动化生产过程的关键一步。下面是一个简要的Fanuc机器人编程指南,帮助您开始编写您的机器人程序。
Fanuc机器人使用的主要编程语言是Karel和TP。Karel是一种类似于C语言的高级编程语言,用于编写复杂的控制逻辑和算法。TP是Fanuc机器人特有的编程语言,用于编写具体的机器人运动和操作指令。
在开始编程之前,您需要熟悉Fanuc机器人的基本编程指令,例如:
- MOVE:用于控制机器人的运动,包括直线运动和旋转运动。
- WAIT:用于暂停程序的执行,等待特定条件的发生。
- CALL:用于调用子程序或功能模块。
- IFTHENELSE:用于实现条件分支逻辑。
- FORNEXT:用于实现循环结构。
编写Fanuc机器人程序时,建议按照以下结构组织程序:
Fanuc提供了专门的机器人编程软件,如Roboguide和KAREL编程工具包,这些工具可以大大简化编程过程并提高效率。通过这些软件,您可以使用图形界面进行编程,直观地创建和编辑机器人程序。
编写完程序后,进行实践与调试是非常重要的一步。在模拟环境中测试程序的正确性和稳定性,确保机器人能够按照预期执行任务。如果出现问题,及时进行调试并修正程序。
机器人技术不断发展,Fanuc也会推出新的机器人型号和编程工具。因此,持续学习与改进是编程人员的重要任务。定期关注Fanuc官方文档、培训课程和社区论坛,保持与行业最新动态的同步。
通过以上步骤,您可以更好地掌握Fanuc机器人的编程技巧,并编写出高效、稳定的机器人程序,提高生产线的自动化水平和生产效率。
免责声明:本网站部分内容由用户自行上传,若侵犯了您的权益,请联系我们处理,谢谢!联系QQ:2760375052 沪ICP备2023024866号-10










评论